Published on:
اختبار أنظمة ADAS في حلبة مقفولة بيثير جدل بعد ما كذا عربية ذكية واجهت صعوبات في سيناريوهات الأمان في السرعات العالية
تقييم جديد نزل لنتائج اختبارات في تراك مقفول لأنظمة القيادة بمساعدة الملاحة رجّع الجدل تاني بين الناس عن مدى جدارة ومصداقية مميزات "القيادة الذكية" الموجودة دلوقتي—خصوصاً لما الظروف بتبقى ملخبطة، ومش متوقعة، والوقت فيها بيبقى حرج جداً.
الاختبار اللي نشرته منصة Dongchedi المتخصصة في العربيات في الصين، جرب 36 عربية في سلسلة من سيناريوهات الأمان النشط على طريق سريع مقفول. المجموعة شملت تشكيلة واسعة من الموديلات المحلية والعالمية المشهورة، بس النتيجة—اللي كانت مليانة فشل متكرر—عملت حالة من القلق.

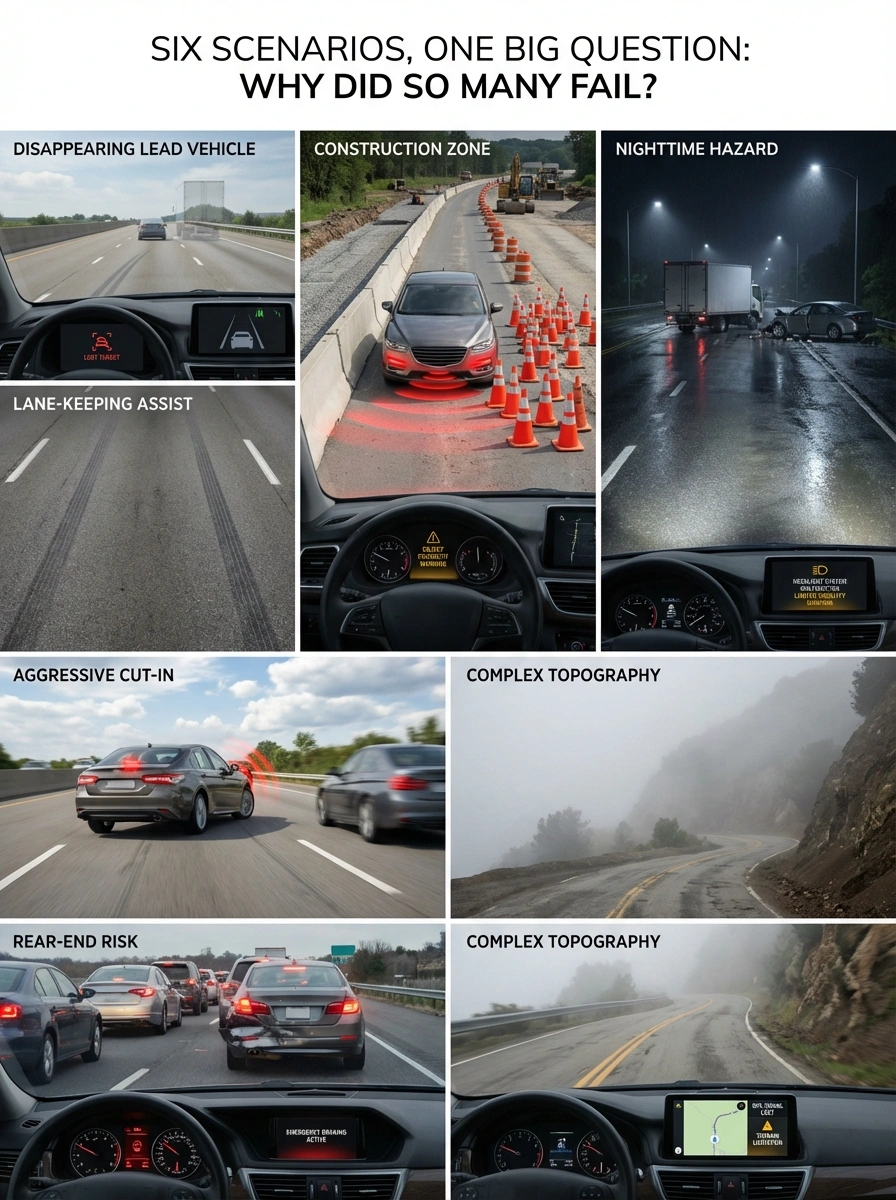
ست سيناريوهات وسؤال كبير: ليه فيه عربيات كتير فشلت؟
العربيات اتقيمت في ست مواقف صعبة للأمان النشط:
- اختفاء العربية اللي في المقدمة: فقدان مفاجئ لتتبع الهدف اللي قدام العربية.
- مناطق الأعمال والإنشاءات: سيناريوهات بمسافات أمان (buffer) قصيرة جداً.
- مخاطر بالليل: طرق مسدودة بعربيات عاملة حادثة ومش منورة أو شاحنات عطلانة.
- الدخول المفاجئ والعنيف (Cut-ins): الاندماج في الطريق السريع والمناورات السريعة في وقت النهار.
- مخاطر التصادم من ورا: تهدئة أو توقف مفاجئ لحركة المرور السريعة.
حتى في تراك متحكم فيه، السيناريوهات دي قدمت قيود واقعية—زي الرؤية المحدودة والتضاريس المعقدة—واللي غلبت الأنظمة اللي في العادي بتأدي كويس في الزحمة العادية.
الإدراك شكله تمام—بس التخطيط والتحكم ممكن يكونوا هما المشكلة
ملاحظة أساسية من الاختبار هي إن عربيات كتير كانت قادرة "تشوف" المخاطر. النقطة الأضعف باين إنها في التخطيط والتحكم.
في أنظمة الـ "end-to-end" الحديثة، فيه شبكات عصبية كبيرة بتحول مدخلات الحساسات لمسار مخطط ليه. النقد مش إن الموديلات دي ملهاش لزمة، بس إنها ممكن تبقى غير مستقرة لما تقابل مجموعة متغيرات مش متعودة عليها. النظام بيتعرف على الخطر بس مش بيقدر يقرر بثقة يعمل إيه بعد كدة—يفرمل، يوجه العربية، ولا يتفادى—تحت ضغط شديد.
"النقطة الأضعف ممكن تكون في التخطيط والتحكم: النظام بيتعرف على الخطر بس مش بيقدر يقرر بثقة يعمل إيه بعد كدة."
"مشكلة الاحتمالات" والتدريب على الحالات النادرة (Edge Cases)
القيادة الحقيقية مش بتعتمد على "حظ الاحتمالات". لما بيبقى فيه خطر عالي، الأنظمة محتاجة سلوك محدد وثابت. بس سيناريوهات التصادم العنيفة نادرة، وده بيخلي صعب "تتعلم" منها من بيانات العالم الحقيقي لوحدها.
عشان يعوضوا ده، شركات العربيات بتستخدم:
- محاكاة سحابية (Cloud-based Simulations): بيخلقوا سيناريوهات "أسوأ الحالات" افتراضياً وبكميات كبيرة.
- التدريب التوليدي (Generative Training): استخلاص معرفة الحالات النادرة دي ورجوعها لموديل العربية.
رغم إن العمليات دي بتتطور، نتائج الاختبار بتقول إن فيه شركات كتير لسه في المراحل الأولى عشان يوصلوا لسلوك آمن ومستقر في الظروف الصعبة.

المنظمين بيأكدوا تاني: السواق بيفضل هو المسؤول
الجدل ده جه مع رسائل جديدة من السلطات بتأكد إن الأنظمة دي مساعدة للسواق، مش قيادة ذاتية.
المسؤولين في نظام إدارة المرور في الصين شددوا على إن السواقين بيفضلوا هما الطرف المسؤول. وكمان فيه توجيهات جديدة لأخلاقيات التكنولوجيا بتطالب بالتواصل بوضوح أكتر مع المستهلكين عشان يمنعوا سوء الفهم وسوء استخدام وظائف مساعدة السواق المتقدمة.
ده معناه إيه للمستهلكين
الخلاصة هي إن مساعدة السواق لسه—بتصميمها—مجرد مساعدة. حتى لو النظام شغال بشكل يبهرك في مواقف يومية كتير، الحوادث النادرة على الطرق السريعة ممكن تجمع قيود بشكل يتخطى بسرعة قدرة الموديلات الحالية إنها تتعامل معاها بثقة.
بالنسبة للسواقين، الرسالة واضحة: اتعامل مع الأنظمة دي كأدوات، مش بديل لتركيزك. الخطوة الجاية في الأمان مش هتيجي من الحفاظ على الحارة المرورية بشكل أنعم، بس هتيجي من تخطيط طوارئ قوي وفهم أعمق من الناس للحدود التكنولوجية.
