Published on:
क्लोज्ड-ट्रैक ADAS टेस्ट ने कई स्मार्ट कारों के हाई-स्पीड सुरक्षा परिदृश्यों में संघर्ष के बाद बहस छेड़ दी है
नेविगेशन-असिस्टेड ड्राइविंग सिस्टम के हाल ही में जारी एक क्लोज्ड-ट्रैक मूल्यांकन ने इस बात पर सार्वजनिक बहस फिर से छेड़ दी है कि आज की “स्मार्ट ड्राइविंग” सुविधाएं वास्तव में कितनी विश्वसनीय हैं—खासकर जब परिस्थितियाँ अव्यवस्थित, अप्रत्याशित और समय-संवेदनशील हो जाती हैं।
चीनी ऑटो मीडिया आउटलेट Dongchedi द्वारा प्रकाशित इस परीक्षण में, एक बंद राजमार्ग पर सक्रिय-सुरक्षा परिदृश्यों की एक श्रृंखला के माध्यम से 36 वाहनों का परीक्षण किया गया। इस लाइनअप में कई लोकप्रिय घरेलू और अंतरराष्ट्रीय मॉडल शामिल थे, लेकिन परिणाम—बार-बार विफलताओं द्वारा चिह्नित—ने चिंता की लहर पैदा कर दी है।

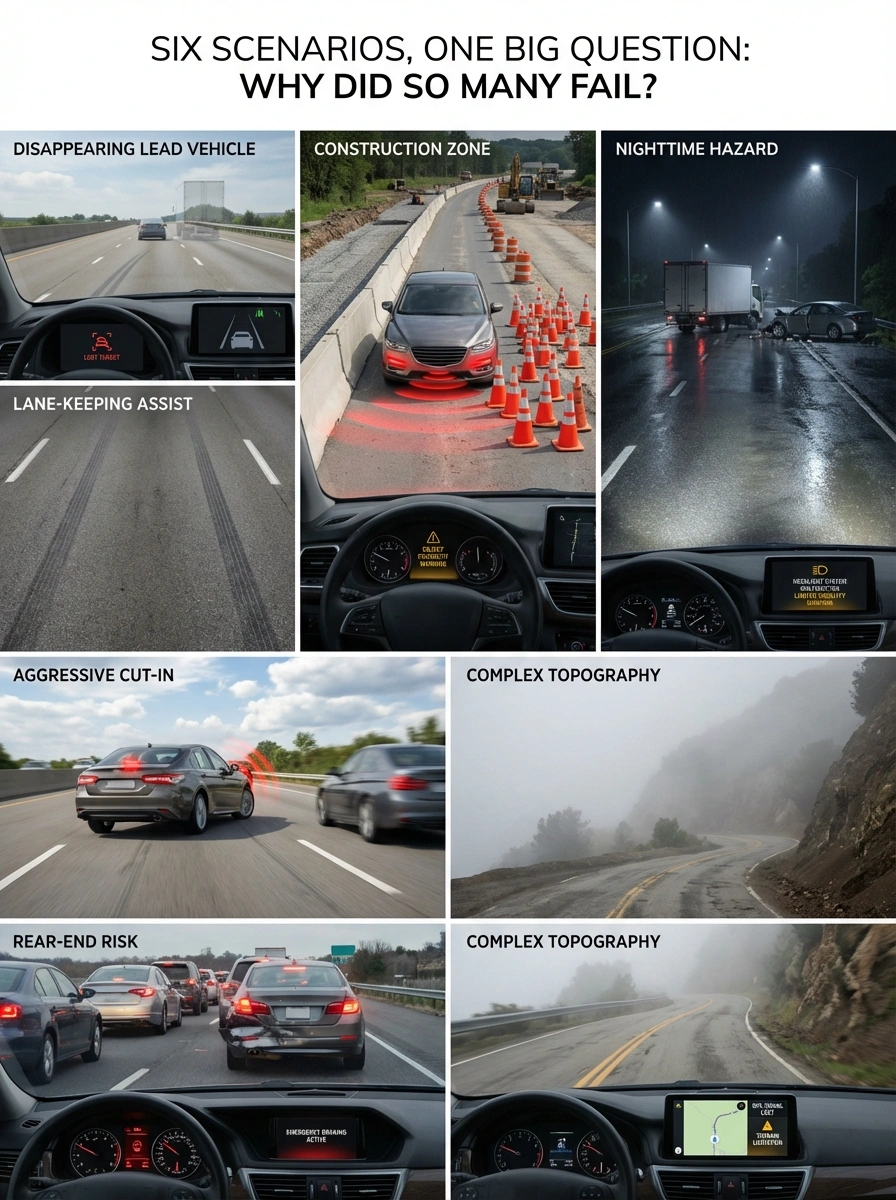
छह परिदृश्य, एक बड़ा सवाल: इतने सारे क्यों विफल हुए?
छह चुनौतीपूर्ण सक्रिय-सुरक्षा स्थितियों में वाहनों का मूल्यांकन किया गया था:
- गायब होता लीड वाहन: आगे के लक्ष्य के ट्रैकिंग का अचानक नुकसान।
- निर्माण क्षेत्र: अत्यंत कम बफर दूरी वाले परिदृश्य।
- रात के समय के खतरे: बिना रोशनी वाले दुर्घटनाग्रस्त वाहनों या रुके हुए ट्रकों के साथ अवरुद्ध रास्ते।
- आक्रामक कट-इन: दिन के समय राजमार्ग पर विलय (merging) और उच्च गति वाले पैंतरे।
- रियर-एंड जोखिम: उच्च गति वाले ट्रैफ़िक का अचानक धीमा होना या रुकना।
एक नियंत्रित पाठ्यक्रम में भी, इन परिदृश्यों ने वास्तविक बाधाओं को पेश किया—सीमित दृश्यता और जटिल स्थलाकृति—जिसने उन प्रणालियों को अभिभूत कर दिया जो आमतौर पर नियमित ट्रैफ़िक में अच्छा प्रदर्शन करती हैं।
धारणा (Perception) ठीक लग रही है—नियोजन और नियंत्रण बाधा हो सकते हैं
परीक्षण से एक मुख्य अवलोकन यह है कि कई वाहन खतरों को "देखने" में सक्षम थे। सबसे बड़ी कमजोरी नियोजन और नियंत्रण (planning and control) में दिखाई देती है।
आधुनिक “एंड-टू-एंड” स्टैक में, बड़े न्यूरल नेटवर्क सेंसर इनपुट को एक नियोजित प्रक्षेपवक्र (trajectory) में अनुवादित करते हैं। आलोचना यह नहीं है कि ये मॉडल बेकार हैं, बल्कि यह है कि चर (variables) के अपरिचित संयोजनों का सामना करने पर वे अस्थिर हो सकते हैं। सिस्टम खतरे को पहचानता है लेकिन चरम दबाव में यह विश्वसनीय रूप से तय नहीं कर पाता कि आगे क्या करना है—ब्रेक लगाना है, स्टीयर करना है, या बचना है।
“सबसे बड़ी कमजोरी नियोजन और नियंत्रण में हो सकती है: सिस्टम खतरे को पहचानता है लेकिन विश्वसनीय रूप से यह तय नहीं कर पाता कि आगे क्या करना है।”
“प्रायिकता की समस्या” और एज केस ट्रेनिंग
वास्तविक ड्राइविंग “प्रायिकता भाग्य” पर भरोसा नहीं कर सकती। जब जोखिम अधिक होता है, तो प्रणालियों को सुसंगत, नियतात्मक व्यवहार की आवश्यकता होती है। हालाँकि, चरम टकराव के परिदृश्य दुर्लभ होते हैं, जिससे उन्हें केवल वास्तविक दुनिया के डेटा से “सीखना” मुश्किल हो जाता है।
इसकी भरपाई के लिए, वाहन निर्माता उपयोग कर रहे हैं:
- क्लाउड-आधारित सिमुलेशन: बड़े पैमाने पर सिंथेटिक “सबसे खराब स्थिति” वाले परिदृश्य बनाना।
- जनरेटिव ट्रेनिंग: सिंथेटिक एज-केस ज्ञान को वापस वाहन-साइड मॉडल में शामिल करना।
जबकि ये पाइपलाइन विकसित हो रही हैं, परीक्षण के परिणाम बताते हैं कि कई अभी भी चरम स्थितियों में लगातार सुरक्षित व्यवहार उत्पन्न करने के शुरुआती चरणों में हैं।

नियामक पुन: जोर देते हैं: ड्राइवर जिम्मेदार बने रहते हैं
विवाद अधिकारियों के नए संदेशों के साथ आता है जो इस बात पर जोर देते हैं कि ये सिस्टम ड्राइवर-सहायता (driver-assistance) हैं, सेल्फ-ड्राइविंग नहीं।
चीन के यातायात प्रबंधन प्रणाली के अधिकारियों ने जोर दिया है कि ड्राइवर ही जिम्मेदार पक्ष बने रहेंगे। नई प्रौद्योगिकी-नैतिकता दिशा-निर्देश भी उपभोक्ताओं को उन्नत ड्राइवर-सहायता कार्यों की गलतफहमी और दुरुपयोग को रोकने के लिए स्पष्ट संचार का आग्रह करते हैं।
उपभोक्ताओं के लिए इसका क्या अर्थ है
मुख्य निष्कर्ष यह है कि ड्राइवर सहायता अभी भी—डिजाइन द्वारा—एक सहायता ही है। भले ही कोई सिस्टम कई दैनिक परिदृश्यों में प्रभावशाली ढंग से काम करता हो, दुर्लभ राजमार्ग घटनाएं बाधाओं को इस तरह से खड़ा कर सकती हैं जो आज के मॉडल की विश्वसनीय रूप से संभालने की क्षमता से जल्दी बाहर हो जाती हैं।
ड्राइवरों के लिए, संदेश स्पष्ट है: इन प्रणालियों को उपकरण के रूप में मानें, ध्यान के विकल्प के रूप में नहीं। सुरक्षा में अगली छलांग स्मूथ लेन-कीपिंग से नहीं आएगी, बल्कि मजबूत आपातकालीन योजना और तकनीकी सीमाओं की गहरी सार्वजनिक समझ से आएगी।
