Published on:
Uji ADAS di Lintasan Tertutup Memicu Perdebatan Setelah Berbagai Mobil Pintar Mengalami Kesulitan dalam Skenario Keselamatan Kecepatan Tinggi
Evaluasi lintasan tertutup yang baru dirilis terhadap sistem mengemudi berbantuan navigasi telah memicu kembali perdebatan publik tentang seberapa andal fitur “smart driving” saat ini—terutama ketika kondisi menjadi kacau, tidak terduga, dan kritis terhadap waktu.
Tes tersebut, yang diterbitkan oleh media otomotif Tiongkok Dongchedi, menguji 36 kendaraan melalui serangkaian skenario keselamatan aktif di jalan tol tertutup. Jajaran tersebut mencakup berbagai model domestik dan internasional yang populer, tetapi hasilnya—yang ditandai dengan kegagalan berulang—telah memicu gelombang kekhawatiran.

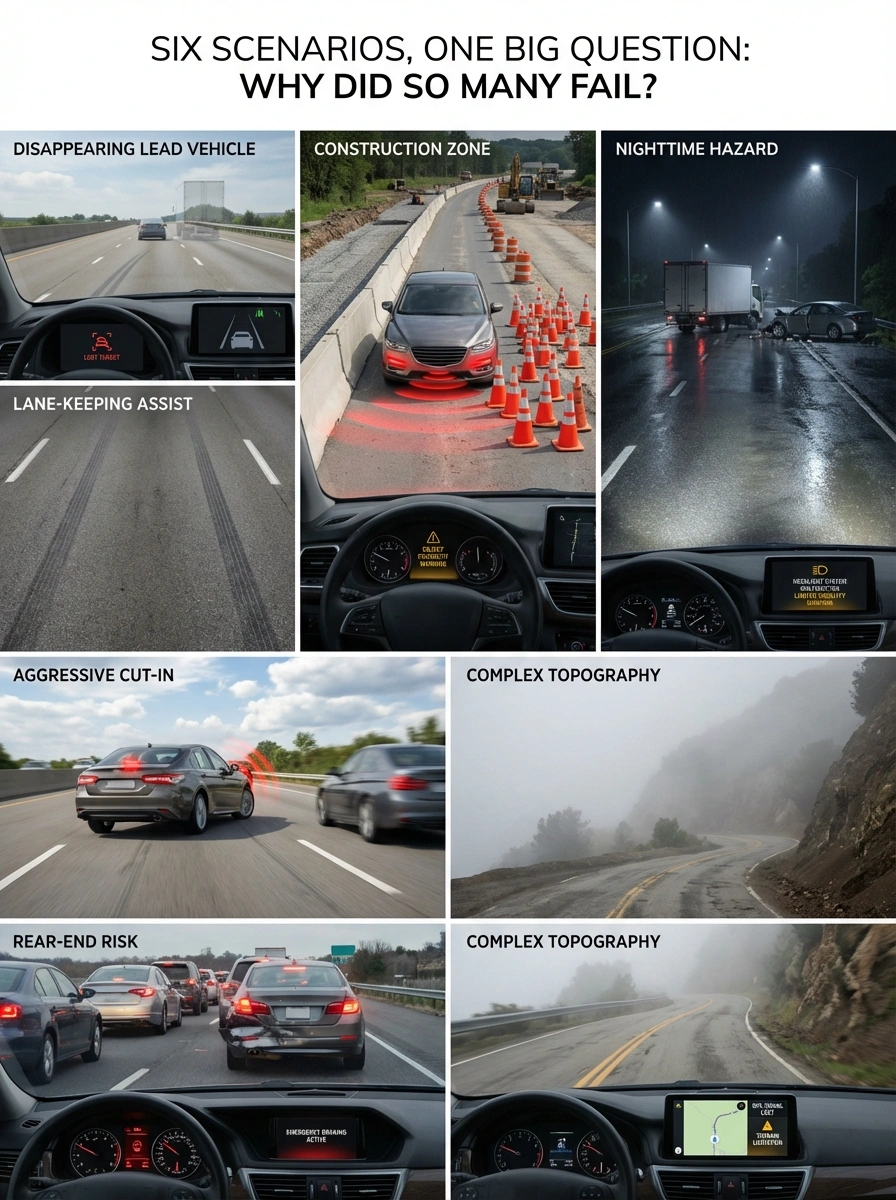
Enam Skenario, Satu Pertanyaan Besar: Mengapa Begitu Banyak yang Gagal?
Kendaraan dievaluasi melalui enam situasi keselamatan aktif yang menuntut:
- Kendaraan Depan yang Menghilang: Hilangnya pelacakan secara tiba-tiba terhadap target di depan.
- Zona Konstruksi: Skenario dengan jarak penyangga yang sangat pendek.
- Bahaya di Malam Hari: Jalur yang terhalang oleh kendaraan kecelakaan tanpa lampu atau truk yang mogok.
- Aksi Memotong Jalur secara Agresif: Penggabungan jalan tol di siang hari dan manuver berkecepatan tinggi.
- Risiko Tabrak Belakang: Perlambatan atau penghentian mendadak dari lalu lintas berkecepatan tinggi.
Bahkan dalam lintasan yang terkendali, skenario ini menghadirkan batasan realistis—visibilitas terbatas dan topografi yang kompleks—yang membebani sistem yang biasanya bekerja dengan baik dalam lalu lintas rutin.
Persepsi Tampak Baik—Perencanaan dan Kontrol Mungkin Menjadi Kendala Utama
Observasi utama dari pengujian ini adalah bahwa banyak kendaraan mampu "melihat" bahaya tersebut. Kelemahan yang lebih besar tampaknya ada pada perencanaan dan kontrol.
Dalam stack “end-to-end” modern, jaringan saraf besar menerjemahkan input sensor menjadi lintasan yang direncanakan. Kritikannya bukan karena model ini tidak berguna, tetapi model tersebut dapat menjadi tidak stabil saat menghadapi kombinasi variabel yang tidak dikenal. Sistem mengenali bahaya tetapi tidak dapat memutuskan dengan andal apa yang harus dilakukan selanjutnya—mengerem, berbelok, atau menghindar—di bawah tekanan ekstrem.
“Kelemahan yang lebih besar mungkin terletak pada perencanaan dan kontrol: sistem mengenali bahaya tetapi tidak dapat memutuskan dengan andal apa yang harus dilakukan selanjutnya.”
“Masalah Probabilitas” dan Pelatihan Edge Case
Mengemudi yang sesungguhnya tidak bisa bergantung pada “keberuntungan probabilitas.” Ketika risiko tinggi, sistem membutuhkan perilaku yang konsisten dan deterministik. Namun, skenario tabrakan ekstrem jarang terjadi, sehingga sulit untuk "dipelajari" hanya dari data dunia nyata saja.
Untuk mengimbanginya, produsen mobil menggunakan:
- Simulasi Berbasis Cloud: Membuat skenario sintetis “kasus terburuk” dalam skala besar.
- Pelatihan Generatif: Menyuling pengetahuan edge-case sintetis kembali ke dalam model sisi kendaraan.
Meskipun pipeline ini terus berkembang, hasil tes menunjukkan bahwa banyak yang masih dalam tahap awal untuk menghasilkan perilaku yang konsisten dan aman di berbagai kondisi ekstrem.

Regulator Menekankan Kembali: Pengemudi Tetap Bertanggung Jawab
Kontroversi ini muncul bersamaan dengan pesan baru dari pihak berwenang yang menekankan bahwa sistem ini adalah asisten pengemudi, bukan swakemudi.
Pihak berwenang dalam sistem manajemen lalu lintas Tiongkok telah menekankan bahwa pengemudi tetap menjadi pihak yang bertanggung jawab. Pedoman etika teknologi baru juga mendesak komunikasi yang lebih jelas kepada konsumen untuk mencegah kesalahpahaman dan penyalahgunaan fungsi asisten pengemudi tingkat lanjut.
Apa Artinya bagi Konsumen
Kesimpulan utamanya adalah bahwa asisten pengemudi masih—sesuai rancangannya—adalah bantuan. Bahkan jika sebuah sistem bekerja secara mengesankan dalam banyak skenario harian, kejadian langka di jalan raya dapat menumpuk kendala dengan cara yang dengan cepat melampaui apa yang dapat ditangani oleh model saat ini secara andal.
Bagi pengemudi, pesannya jelas: perlakukan sistem ini sebagai alat, bukan pengganti perhatian. Lompatan besar berikutnya dalam keselamatan tidak akan datang dari fitur lane-keeping yang lebih mulus, melainkan dari perencanaan darurat yang tangguh dan pemahaman publik yang lebih dalam tentang batasan teknologi.
