Published on:
クローズドコースでのADASテストが議論を呼ぶ、複数のスマートカーが高速域の安全シナリオに苦戦
新たに公開されたナビゲーション支援運転システムのクローズドコース評価が、今日の「スマートドライビング」機能が実際にどれほど信頼できるのかという公衆の議論を再燃させています。特に、状況が混乱し、予測不可能で、一分一秒を争うような場面においてです。
中国の自動車メディア Dongchedi が公開したこのテストでは、36台の車両がクローズドの高速道路で一連のアクティブセーフティ(能動的安全)シナリオに挑みました。ラインナップには国内外の幅広い人気モデルが含まれていましたが、繰り返される失敗が目立つ結果となり、懸念の波が広がっています。

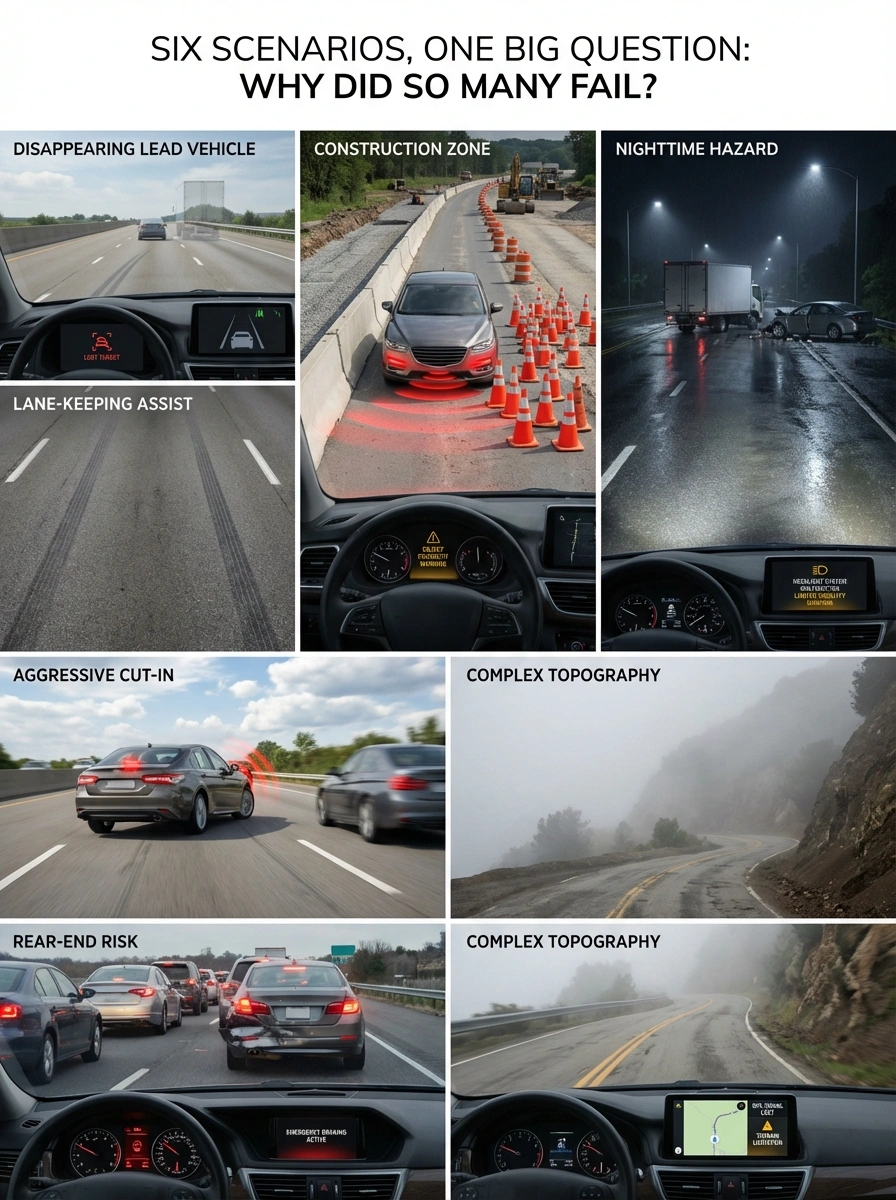
6つのシナリオ、1つの大きな疑問:なぜこれほど多くが失敗したのか?
車両は、要求の厳しい6つのアクティブセーフティ状況で評価されました:
- 先行車の消失: 前方のターゲットに対する追跡が突然失われる状況。
- 工事区間: 緩衝距離が極端に短いシナリオ。
- 夜間の危険: 無灯火の事故車両や停車中のトラックによって進路が塞がれた状態。
- 強引な割り込み: 日中の高速道路での合流や高速走行時のマニューバ。
- 追突リスク: 高速走行中の交通の流れが突然減速または停止する状況。
管理されたコース内であっても、これらのシナリオは、視界の制限や複雑な地形といった現実的な制約を導入しており、通常、通常の交通状況では良好に動作するシステムを圧倒しました。
認識は問題ないように見える — ボトルネックは計画と制御にある可能性
テストからの重要な観察結果は、多くの車両が危険を「見る」ことができていたということです。より大きな弱点は、計画と制御にあるようです。
最新の「エンドツーエンド」スタックでは、巨大なニューラルネットワークがセンサー入力を計画された軌道へと変換します。批判の内容は、これらのモデルが役に立たないということではなく、未知の変数の組み合わせに遭遇したときに不安定になる可能性があるということです。システムは危険を認識しますが、極限のプレッシャーの下で、次に何をすべきか(ブレーキ、ステアリング、回避)を確実に決定することができません。
「より大きな弱点は計画と制御にある可能性があります。システムは危険を認識しますが、次に何をすべきかを確実に決定できないのです。」
「確率の問題」とエッジケースのトレーニング
実際の運転は「確率的な運」に頼ることはできません。リスクが高いとき、システムには一貫した決定論的な動作が求められます。しかし、極端な衝突シナリオは稀であるため、現実世界のデータだけでそれらを「学習」することは困難です。
これを補うために、自動車メーカーは以下を活用しています:
- クラウドベースのシミュレーション: 合成された「最悪のケース」のシナリオを大規模に作成。
- 生成トレーニング: 合成されたエッジケースの知識を車両側のモデルに蒸留して戻す。
これらのパイプラインは進化していますが、テスト結果は、多くのメーカーが極限状態において一貫して安全な動作を実現する初期段階にまだあることを示唆しています。

規制当局の再強調:ドライバーに責任が残る
この論争は、当局からの「これらのシステムは自動運転ではなく、運転支援である」というメッセージの再発信と重なっています。
中国の交通管理部門の当局者は、ドライバーが引き続き責任を負う主体であることを強調しました。また、新しいテクノロジー倫理ガイドラインでは、高度な運転支援機能の誤解や誤用を防ぐために、消費者へのより明確なコミュニケーションを求めています。
これが消費者に意味すること
主要な教訓は、運転支援は依然として、設計上「支援」であるということです。たとえ多くの日常的なシナリオで印象的に機能したとしても、稀に発生する高速道路のイベントは、今日のモデルが確実に対処できる範囲をすぐに超える形で制約を積み重ねることがあります。
ドライバーにとってのメッセージは明確です:これらのシステムを、注視の代わりではなく、ツールとして扱うこと。 安全性における次の飛躍は、よりスムーズな車線維持からではなく、堅牢な緊急計画と、技術的限界に対する一般市民のより深い理解から生まれるでしょう。
