Published on:
폐쇄 트랙 ADAS 테스트, 다수의 스마트카가 고속 안전 시나리오에서 어려움을 겪으며 논쟁 촉발
새롭게 공개된 내비게이션 지원 주행 시스템의 폐쇄 트랙 평가가 오늘날의 “스마트 주행” 기능이 실제로 얼마나 신뢰할 수 있는지—특히 상황이 혼란스럽고, 예측 불가능하며, 시간이 촉박할 때—에 대한 대중의 논쟁에 다시 불을 붙였습니다.
중국 자동차 매체 Dongchedi가 발표한 이번 테스트는 폐쇄된 고속도로에서 36대의 차량을 대상으로 일련의 능동 안전 시나리오를 진행했습니다. 라인업에는 국내외 인기 모델들이 폭넓게 포함되었지만, 반복적인 실패로 점철된 결과는 우려의 물결을 일으켰습니다.

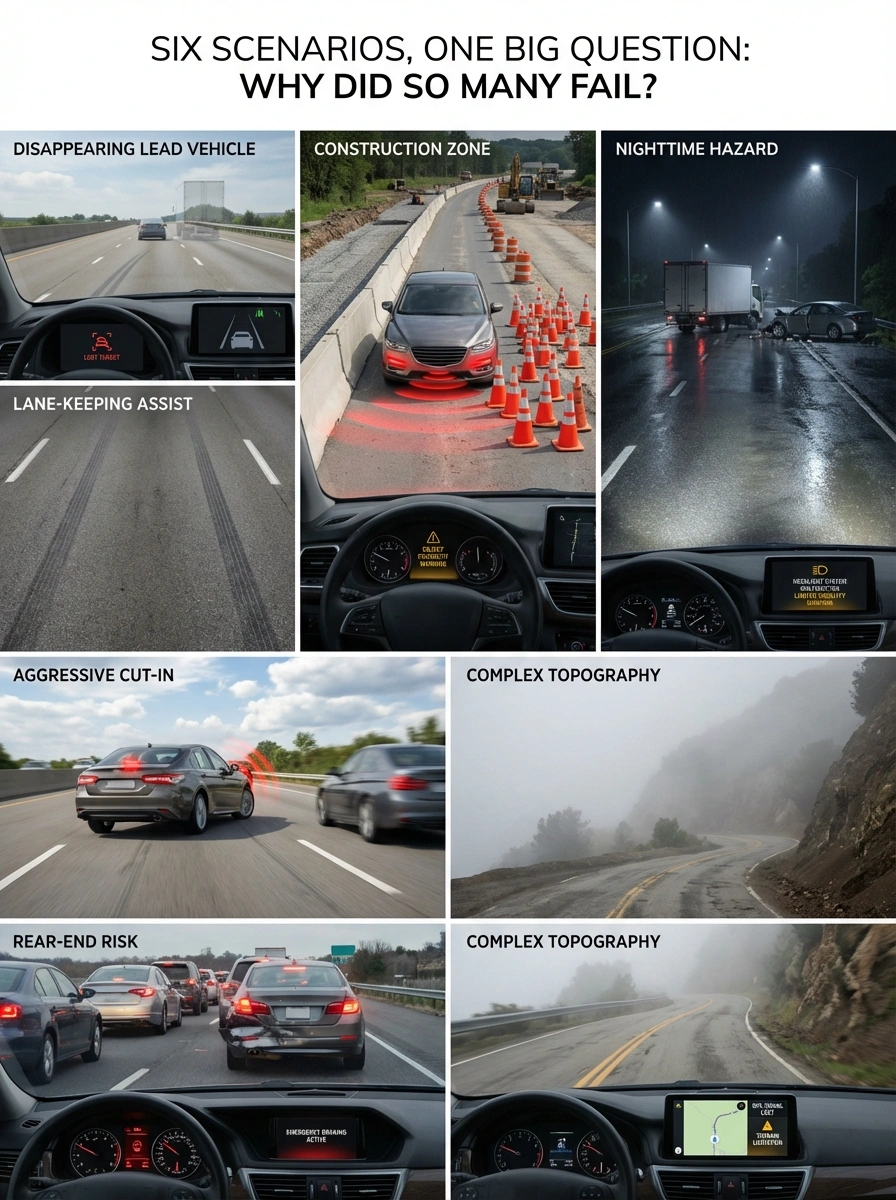
여섯 가지 시나리오, 하나의 큰 질문: 왜 그렇게 많은 차량이 실패했는가?
차량들은 까다로운 여섯 가지 능동 안전 상황에서 평가되었습니다:
- 선행 차량 소실: 전방 목표물에 대한 추적을 갑자기 상실함.
- 공사 구역: 완충 거리가 극도로 짧은 시나리오.
- 야간 위험 요소: 전조등이 꺼진 사고 차량이나 멈춰 선 트럭으로 차단된 경로.
- 공격적인 끼어들기: 주간 고속도로 합류 및 고속 기동.
- 추돌 위험: 고속 교통 흐름에서 갑작스러운 감속 또는 정지.
통제된 코스에서도 이러한 시나리오들은 일상적인 교통 상황에서는 잘 작동하던 시스템들을 압도하는 현실적인 제약 조건(제한된 가시성 및 복잡한 지형)을 제시했습니다.
인지는 괜찮아 보임—계획 및 제어가 병목 현상일 수 있음
테스트의 핵심 관찰 결과는 많은 차량이 위험 요소를 "볼" 수 있었다는 점입니다. 더 큰 약점은 계획 및 제어인 것으로 보입니다.
현대적인 “엔드 투 엔드(end-to-end)” 스택에서 거대 신경망은 센서 입력을 계획된 궤적으로 변환합니다. 비판의 핵심은 이러한 모델들이 쓸모없다는 것이 아니라, 익숙하지 않은 변수 조합을 만났을 때 불안정해질 수 있다는 점입니다. 시스템은 위험을 인식하지만, 극심한 압박 속에서 다음에 무엇을 해야 할지—브레이크를 밟을지, 조향할지, 피할지—를 안정적으로 결정하지 못합니다.
“더 큰 약점은 계획 및 제어에 있을 수 있습니다. 시스템은 위험을 인식하지만 다음에 무엇을 해야 할지 안정적으로 결정하지 못합니다.”
“확률 문제”와 엣지 케이스 학습
실제 주행은 “확률적 운”에 의존할 수 없습니다. 위험이 높을 때 시스템은 일관되고 결정론적인 행동이 필요합니다. 그러나 극단적인 충돌 시나리오는 드물기 때문에 실제 데이터만으로는 이를 “학습”하기 어렵습니다.
이를 보완하기 위해 자동차 제조사들은 다음을 사용하고 있습니다:
- 클라우드 기반 시뮬레이션: 대규모로 가상의 “최악의 시나리오”를 생성합니다.
- 생성형 학습: 가상의 엣지 케이스 지식을 차량 측 모델로 다시 정제하여 주입합니다.
이러한 파이프라인이 진화하고 있지만, 테스트 결과는 많은 시스템이 여전히 극한 조건에서 일관되게 안전한 행동을 생성하는 초기 단계에 머물러 있음을 시사합니다.

규제 당국 재강조: 운전자의 책임은 여전함
이 논란은 이러한 시스템이 자율 주행이 아닌 운전자 지원임을 강조하는 당국의 새로운 메시지와 함께 등장했습니다.
중국 교통 관리 시스템 당국은 운전자가 여전히 책임 당사자임을 강조해 왔습니다. 새로운 기술 윤리 가이드라인 또한 소비자들이 첨단 운전자 지원 기능을 오해하거나 오용하는 것을 방지하기 위해 보다 명확한 소통을 촉구하고 있습니다.
이것이 소비자에게 의미하는 바
주요 요점은 운전자 지원이 여전히—설계상—지원 기능이라는 점입니다. 시스템이 많은 일상적인 시나리오에서 인상적으로 작동하더라도, 드문 고속도로 사건들은 오늘날의 모델들이 안정적으로 처리하는 범위를 빠르게 벗어나는 방식으로 제약 조건을 중첩시킬 수 있습니다.
운전자들에게 메시지는 분명합니다: 이러한 시스템을 주의 집중을 대신하는 것이 아니라 도구로 취급하십시오. 안전의 다음 도약은 더 부드러운 차선 유지에서 오는 것이 아니라, 견고한 비상 계획과 기술적 한계에 대한 대중의 더 깊은 이해에서 올 것입니다.
