Published on:
ADAS-test op afgesloten circuit ontketent debat nadat meerdere slimme auto's moeite hebben met veiligheidsscenario's bij hoge snelheden
Een onlangs gepubliceerde evaluatie op een gesloten circuit van navigatie-ondersteunde rijsystemen heeft het publieke debat opnieuw doen oplaaien over hoe betrouwbaar de huidige functies voor "slim rijden" werkelijk zijn — vooral wanneer omstandigheden onoverzichtelijk, onvoorspelbaar en tijdkritisch worden.
De test, gepubliceerd door het Chinese automedium Dongchedi, onderwierp 36 voertuigen aan een reeks actieve veiligheidsscenario's op een afgesloten snelweg. De selectie omvatte een breed scala aan populaire binnenlandse en internationale modellen, maar de uitkomst — gekenmerkt door herhaalde mislukkingen — heeft voor een golf van bezorgdheid gesorgd.

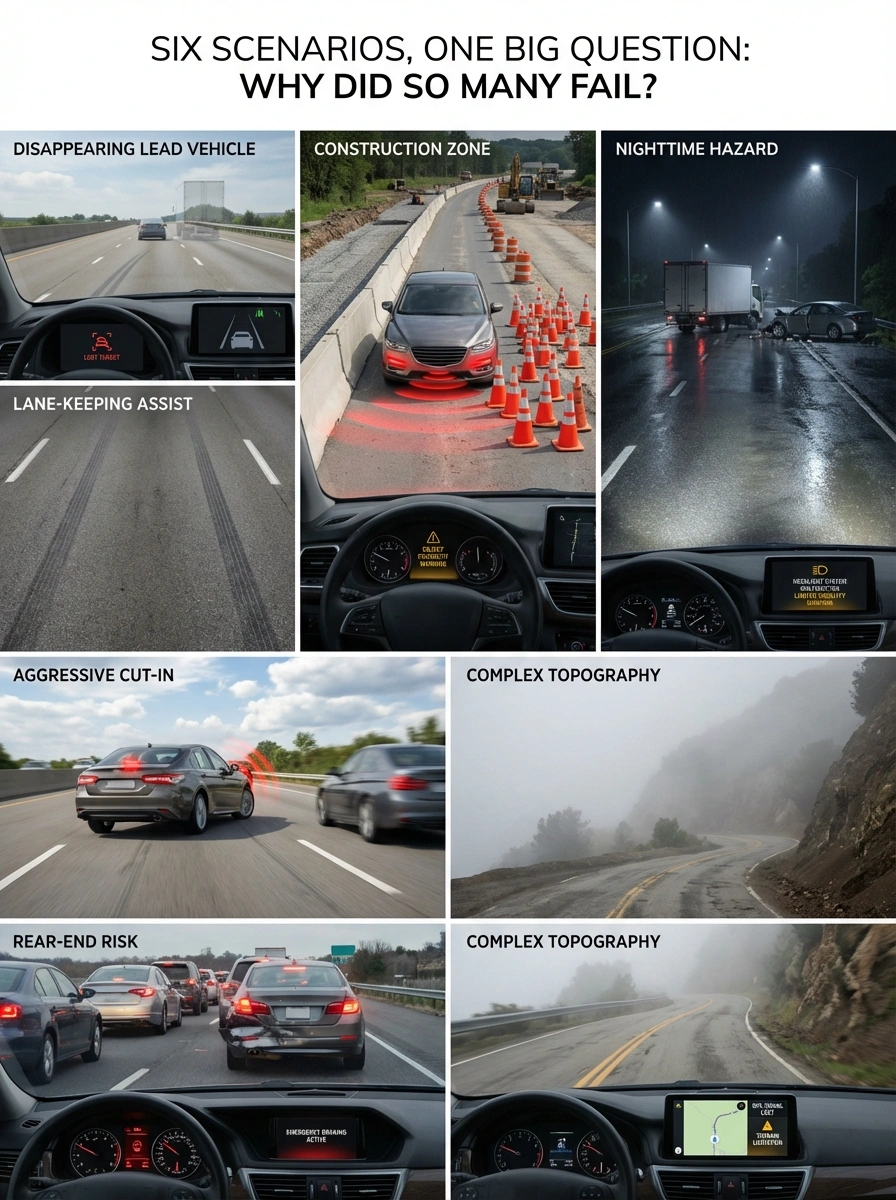
Zes scenario's, één grote vraag: waarom faalden er zoveel?
Voertuigen werden geëvalueerd in zes veeleisende situaties voor actieve veiligheid:
- Verdwijnend voorliggend voertuig: Een plotseling verlies van tracking van het doelwit voor de auto.
- Werkzaamheden: Scenario's met extreem korte bufferafstanden.
- Gevaren in de nacht: Geblokkeerde wegen met onverlichte voertuigen met pech of stilstaande vrachtwagens.
- Agressief invoegen: Invoegen op de snelweg overdag en manoeuvres op hoge snelheid.
- Risico op kop-staartbotsingen: Plotseling afremmen of stoppen van verkeer op hoge snelheid.
Zelfs op een gecontroleerd circuit introduceerden deze scenario's realistische beperkingen — beperkt zicht en complexe topografie — die systemen overweldigden die gewoonlijk goed presteren in routineverkeer.
Perceptie lijkt in orde — Planning en controle zijn mogelijk de bottleneck
Een belangrijke observatie uit de test is dat veel voertuigen de gevaren konden "zien". De grootste zwakte lijkt te liggen in planning en controle.
In moderne "end-to-end" stacks vertalen grote neurale netwerken sensorinputs naar een gepland traject. De kritiek is niet dat deze modellen nutteloos zijn, maar dat ze onstabiel kunnen worden wanneer ze onbekende combinaties van variabelen tegenkomen. Het systeem herkent een gevaar, maar kan onder extreme druk niet betrouwbaar beslissen wat de volgende stap is — remmen, sturen of ontwijken.
“De grootste zwakte ligt mogelijk in de planning en controle: het systeem herkent een gevaar, maar kan onder extreme druk niet betrouwbaar beslissen wat de volgende stap is.”
Het “waarschijnlijkheidsprobleem” en training op randgevallen (edge cases)
Echt rijden kan niet vertrouwen op “geluk met waarschijnlijkheid.” Wanneer het risico hoog is, hebben systemen consistent, deterministisch gedrag nodig. Extreme botsingsscenario's zijn echter zeldzaam, waardoor ze moeilijk te "leren" zijn op basis van alleen gegevens uit de echte wereld.
Om dit te compenseren, gebruiken autofabrikanten:
- Cloud-gebaseerde simulaties: Het op schaal creëren van synthetische “worst-case” scenario's.
- Generatieve training: Het distilleren van synthetische kennis over randgevallen terug in het model aan de voertuigzijde.
Hoewel deze processen in ontwikkeling zijn, suggereren de testresultaten dat velen zich nog in de beginfase bevinden van het produceren van consistent veilig gedrag onder extreme omstandigheden.

Toezichthouders benadrukken opnieuw: Bestuurders blijven verantwoordelijk
De controverse komt samen met vernieuwde berichtgeving van autoriteiten die benadrukken dat deze systemen bestuurdersassistentie zijn, niet zelfrijdend.
Autoriteiten in het Chinese verkeersbeheersysteem hebben benadrukt dat bestuurders de verantwoordelijke partij blijven. Nieuwe richtlijnen voor technologie-ethiek dringen ook aan op duidelijkere communicatie naar consumenten om misverstanden en misbruik van geavanceerde bestuurdersassistentiefuncties te voorkomen.
Wat dit betekent voor consumenten
De belangrijkste conclusie is dat bestuurdersassistentie nog steeds — door het ontwerp — assistentie is. Zelfs als een systeem indrukwekkend werkt in veel dagelijkse scenario's, kunnen zeldzame gebeurtenissen op de snelweg beperkingen op zo'n manier stapelen dat ze snel overstijgen wat de huidige modellen betrouwbaar aankunnen.
Voor bestuurders is de boodschap duidelijk: beschouw deze systemen als hulpmiddelen, niet als vervanging voor aandacht. De volgende sprong voorwaarts in veiligheid zal niet komen van soepelere rijstrookbegeleiding, maar van robuuste noodplanning en een dieper publiek begrip van de technologische limieten.
