Published on:
ADAS-test på stängd bana väcker debatt efter att flera smarta bilar haft svårt med säkerhetsscenarier i hög hastighet
En nyligen släppt utvärdering på stängd testbana av navigeringsassisterade körsystem har på nytt väckt den offentliga debatten om hur tillförlitliga dagens "smarta körfunktioner" egentligen är - särskilt när förhållandena blir röriga, oförutsägbara och tidskritiska.
Testet, som publicerades av det kinesiska bilmediet Dongchedi, lät 36 fordon genomgå en serie scenarier för aktiv säkerhet på en avstängd motorväg. Startfältet täckte ett brett spektrum av populära inhemska och internationella modeller, men resultatet - präglat av upprepade misslyckanden - har utlöst en våg av oro.

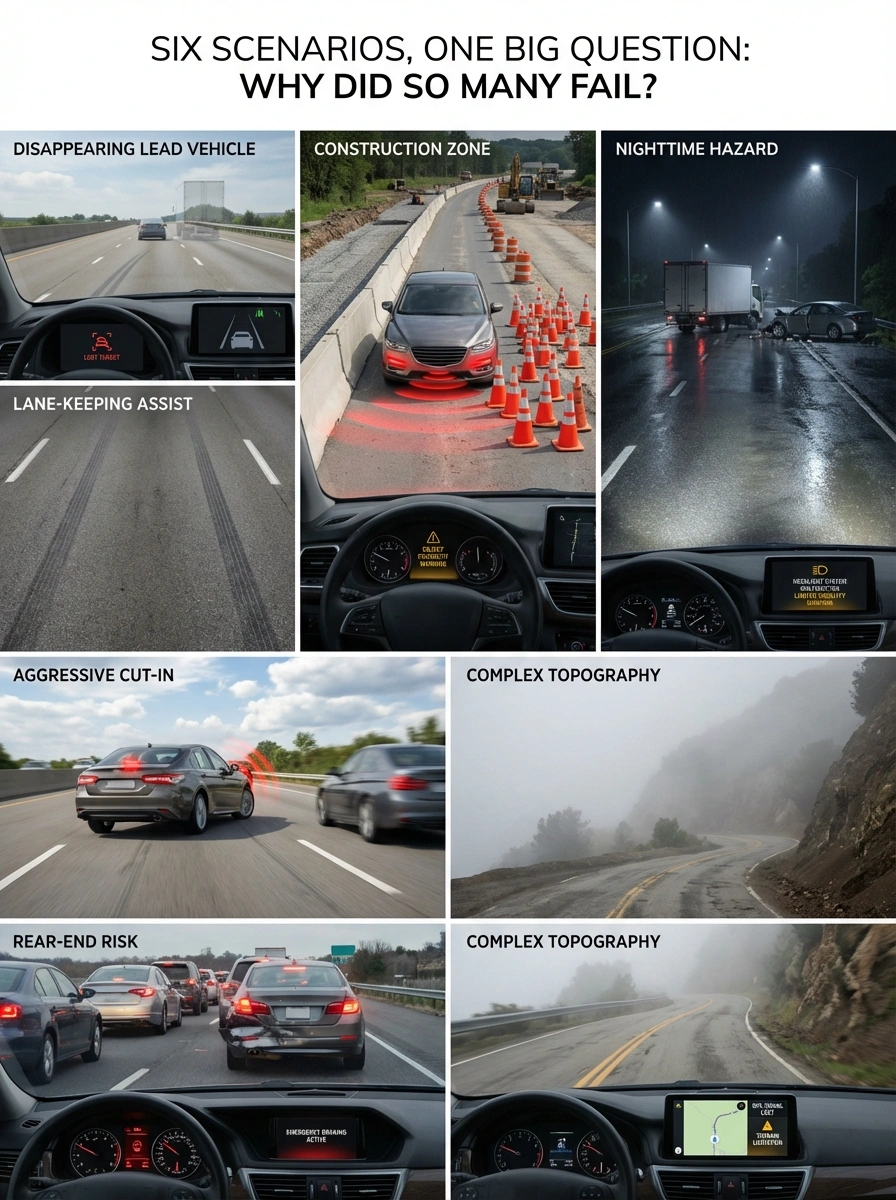
Sex scenarier, en stor fråga: Varför misslyckades så många?
Fordonen utvärderades i sex krävande situationer för aktiv säkerhet:
- Försvinnande ledande fordon: En plötslig förlust av spårning för målet framför.
- Vägarbetsområden: Scenarier med extremt korta buffertavstånd.
- Nattliga faror: Blockera vägar med osläckta olycksfordon eller stillastående lastbilar.
- Aggressiva inbrytningar: Filbyten på motorväg dagtid och manövrar i hög hastighet.
- Risker för påkörning bakifrån: Plötslig inbromsning eller stopp i höghastighetstrafik.
Även på en kontrollerad bana introducerade dessa scenarier realistiska begränsningar - begränsad sikt och komplex topografi - som överväldigade system som vanligtvis fungerar väl i rutintrafik.
Perception ser bra ut - planering och kontroll kan vara flaskhalsen
En viktig iakttagelse från testet är att många fordon kunde "se" farorna. Den större svagheten verkar vara planering och kontroll.
I moderna "end-to-end"-lösningar översätter stora neurala nätverk sensordata till en planerad bana. Kritiken handlar inte om att dessa modeller är värdelösa, utan om att de kan bli instabila när de möter okända kombinationer av variabler. Systemet känner igen en fara men kan inte på ett tillförlitligt sätt besluta vad det ska göra härnäst - bromsa, styra eller undvika - under extrem press.
”Den större svagheten kan ligga i planering och kontroll: systemet känner igen en fara men kan inte på ett tillförlitligt sätt besluta vad det ska göra härnäst.”
”Sannolikhetsproblemet” och träning på gränsfall
Verklig körning kan inte förlita sig på ”sannolikhetstur”. När risken är hög behöver systemen ett konsekvent, deterministiskt beteende. Extrema kollisionsscenarier är dock sällsynta, vilket gör dem svåra att ”lära sig” enbart från data från den verkliga världen.
För att kompensera använder biltillverkare:
- Molnbaserade simuleringar: Skapar syntetiska ”worst-case”-scenarier i stor skala.
- Generativ träning: Destillerar syntetisk kunskap om gränsfall tillbaka till modellen i fordonet.
Medan dessa processer utvecklas tyder testresultaten på att många fortfarande befinner sig i de tidiga stadierna av att producera ett konsekvent säkert beteende under extrema förhållanden.

Myndigheter understryker: Föraren bär fortfarande ansvaret
Kontroversen kommer samtidigt som förnyade budskap från myndigheter betonar att dessa system är förarassistans, inte självkorning.
Myndigheter inom Kinas trafikledningssystem har betonat att förare förblir den ansvariga parten. Nya tekniketiska riktlinjer uppmanar också till tydligare kommunikation till konsumenter för att förhindra missförstånd och missbruk av avancerade förarassistansfunktioner.
Vad detta betyder för konsumenter
Den viktigaste slutsatsen är att förarassistans fortfarande - genom sin konstruktion - är assistans. Även om ett system fungerar imponerande i många vardagliga scenarier, kan sällsynta händelser på motorvägen stapla begränsningar på sätt som snabbt överstiger vad dagens modeller hanterar tillförlitligt.
För förare är budskapet tydligt: se dessa system som verktyg, inte som ersättningar för uppmärksamhet. Nästa stora steg framåt för säkerheten kommer inte från mjukare filhållning, utan från robust nödplanering och en djupare offentlig förståelse för tekniska begränsningar.
