Published on:
封闭场地 ADAS 测试引发争议:多款智能汽车在高速安全场景中表现不佳
一份最新发布的导航辅助驾驶系统封闭场地测评再次引发了公众对当今“智驾”功能可靠性的讨论——尤其是在路况变得混乱、不可预测且时效紧迫的情况下。
由中国汽车媒体懂车帝发布的这项测试,让 36 辆车型在封闭高速公路上接受了一系列主动安全场景的考验。参评阵容涵盖了广泛的热门国产和国际车型,但其结果——以屡次失败为特征——引发了一波担忧。

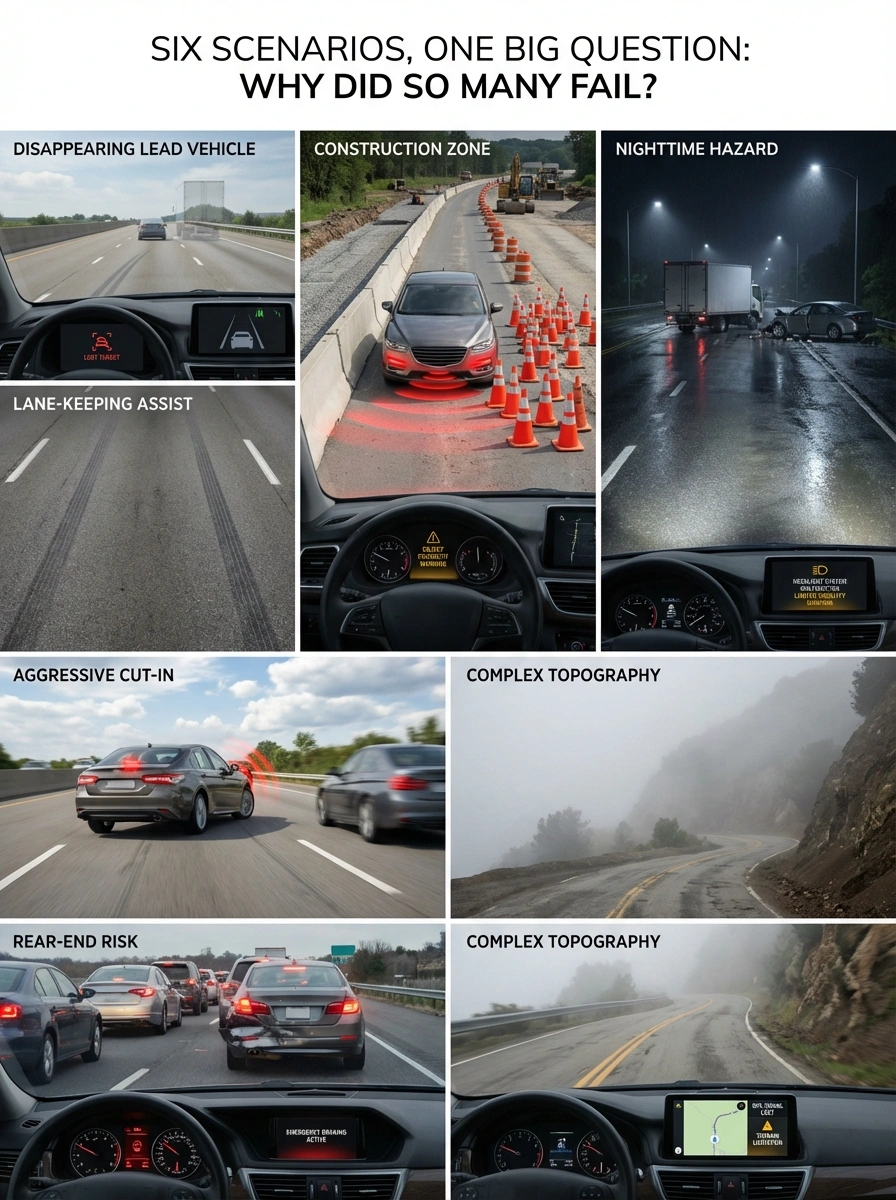
六大场景,一个核心问题:为什么这么多车型折戟?
车辆在六个严苛的主动安全场景中接受了评估:
- 前车消失: 突然失去对前方目标车辆的追踪。
- 施工路段: 缓冲区距离极短的场景。
- 夜间障碍: 道路被无灯光的事故车或停驶卡车阻挡。
- 激进加塞: 日间高速公路并线和高速机动。
- 追尾风险: 高速车流突然减速或停止。
即使在受控场地上,这些场景也引入了真实的限制条件——有限的视野和复杂的地形——这让平时在常规交通中表现良好的系统也感到难以招架。
感知看起来尚可——规控可能是瓶颈
测试中的一个关键观察结果是,许多车辆能够“看到”危险。更大的弱点似乎在于规划与控制(规控)。
在现代“端到端”架构中,大型神经网络将传感器输入转化为规划轨迹。批评者并非认为这些模型毫无用处,而是认为在遇到陌生的变量组合时,它们可能会变得不稳定。系统识别到了危险,但在极端的压力下,无法可靠地决定下一步该做什么——是制动、转向还是避让。
“更大的弱点可能在于规控:系统识别到了危险,但无法可靠地决定下一步该做什么。”
“概率问题”与长尾场景训练
真实的驾驶不能依赖“概率运气”。当风险较高时,系统需要一致的、确定性的行为。然而,极端的碰撞场景非常罕见,这使得仅凭现实世界数据很难进行“学习”。
为了弥补这一缺陷,汽车制造商正在使用:
- 云端仿真: 大规模创建合成的“最坏情况”场景。
- 生成式训练: 将合成的长尾场景知识提炼回车端模型。
虽然这些流程正在进化,但测试结果表明,许多系统在极端条件下产生一致安全行为方面仍处于早期阶段。

监管部门再次强调:驾驶员仍是责任主体
这场争议出现的同时,相关部门也再次发布信息,强调这些系统是驾驶辅助,而非自动驾驶。
中国交通管理部门强调,驾驶员仍是责任方。新的科技伦理指南也敦促向消费者进行更清晰的沟通,以防止对高级驾驶辅助功能的误解和滥用。
对消费者的启示
最核心的结论是,驾驶辅助在设计初衷上仍然只是——辅助。即使一个系统在许多日常场景中表现出色,罕见的高速公路事件也会以超出当今模型可靠处理能力的方式叠加限制条件。
对于驾驶者来说,信息很明确:将这些系统视为工具,而不是注意力的替代品。 安全领域的下一次飞跃不会来自更平滑的车道保持,而将来自稳健的应急规划以及公众对技术局限性的深入理解。
