Published on:
封閉場地 ADAS 測試引發熱議:多款智慧汽車在高速安全場景中表現不佳
一項最新發布的封閉場地導航輔助駕駛系統評測,再次引發了公眾對於現今「智慧駕駛」功能可靠性的辯論——特別是在路況混亂、不可預測且時間緊迫的情況下。
這項由中國汽車媒體懂車帝發布的測試,讓 36 輛車在封閉高速公路上進行了一系列主動安全場景測試。受測陣容涵蓋了廣泛的熱門國內外車型,但測試結果——以反覆失敗為特徵——引發了一波疑慮。

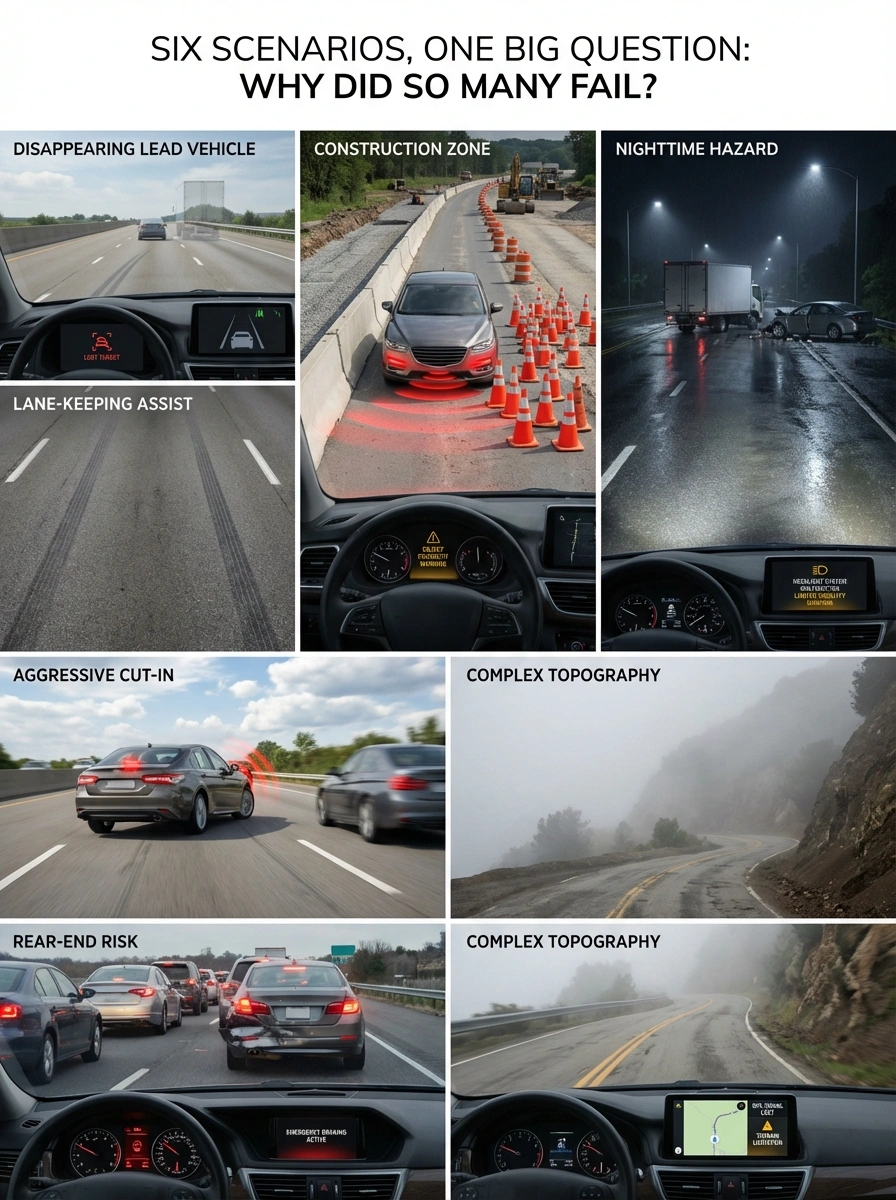
六大場景,一個大問題:為什麼這麼多車輛失敗了?
車輛在六種要求苛刻的主動安全情境下接受了評估:
- 前車消失: 突然失去對前方目標的追蹤。
- 施工區域: 緩衝距離極短的場景。
- 夜間障礙物: 被未開燈的事故車輛或停駛卡車阻擋的道路。
- 激進切入: 日間高速公路匯入與高速變道動作。
- 追撞風險: 高速車流突然減速或停止。
即使在受控場地中,這些場景也引入了現實中的限制因素——視線受限和地形複雜——這讓平時在日常交通中表現良好的系統也難以應對。
感知表現尚可——規控可能是瓶頸
測試中的一個關鍵觀察是,許多車輛能夠「看見」危險。更大的弱點似乎在於規劃與控制。
在現代的「端到端」架構中,大型神經網路將感測器輸入轉換為規劃軌跡。批評並非指這些模型毫無用處,而是它們在遇到陌生的變數組合時可能會變得不穩定。系統辨識出了危險,但在極大壓力下無法可靠地決定下一步該做什麼——是煞車、轉向還是規避。
「更大的弱點可能在於規劃與控制:系統辨識出了危險,但無法可靠地決定下一步該做什麼。」
「機率問題」與邊際案例訓練
真實駕駛不能依靠「機率運氣」。當風險很高時,系統需要一致且確定性的行為。然而,極端的碰撞情境很少見,這使得僅憑現實世界的數據很難「學習」這些情境。
為了補足這一點,汽車製造商正在使用:
- 雲端模擬: 大規模創建合成的「最壞情況」場景。
- 生成式訓練: 將合成的邊際案例知識提煉回車端模型中。
雖然這些開發流程正在進化,但測試結果顯示,許多系統在極端條件下產生一致安全行為的方面仍處於早期階段。

監管機構再次強調:駕駛者仍需負責
此次爭議發生之際,相關部門再次發布訊息,強調這些系統是駕駛輔助,而非自動駕駛。
中國交通管理系統的權威人士強調,駕駛者仍是責任方。新的技術倫理指南也敦促向消費者進行更清晰的溝通,以防止對先進駕駛輔助功能的誤解與誤用。
這對消費者意味著什麼
最核心的結論是,駕駛輔助在設計上仍然只是——輔助。即便一個系統在許多日常場景中表現出色,罕見的高速公路事件仍可能以各種方式堆疊限制條件,迅速超出當前模型的可靠處理能力。
對於駕駛者來說,訊息很明確:將這些系統視為工具,而非注意力的替代品。 安全性的下一個飛躍將不來自於更平穩的車道保持,而來自於強健的緊急規劃,以及公眾對技術極限更深層次的理解。
